Anatomical Engineering Research
Advanced biomedical engineering research focusing on anatomical structures and medical applications
Research Laboratory
Visit our laboratory website to learn more about our ongoing research and publications in anatomical engineering. Our lab specializes in motion capture systems, biomechanical analysis, and innovative approaches to understanding human movement.
Visit Anatomics Lab Website
As an undergraduate research assistant, I work extensively with Vicon motion capture systems to track and analyze human movement patterns. This cutting-edge technology allows us to capture precise biomechanical data for research into motor control, rehabilitation, and human performance.
Technical Expertise:
- Vicon motion capture system operation and calibration
- Nexus software for data processing and analysis
- 3D biomechanical modeling and visualization
- Human movement tracking and kinematic analysis
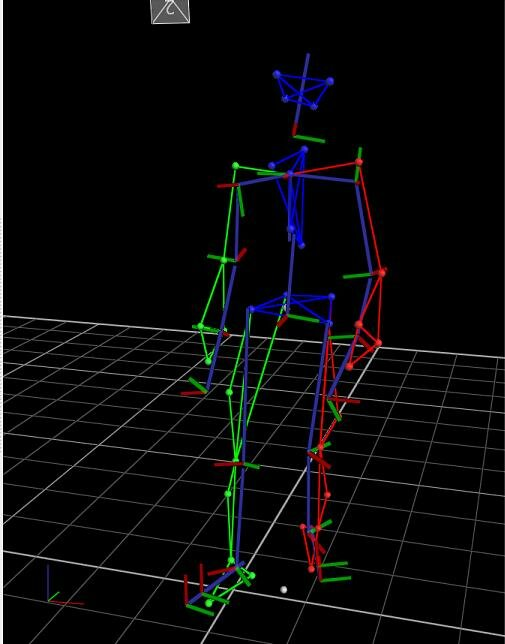
3D Motion Capture Visualization in Vicon Nexus
Research Applications:
Data Collection & Processing
Comprehensive motion capture data collection using high-precision Vicon cameras, followed by detailed processing in Nexus software to extract meaningful biomechanical parameters.
Biomechanical Analysis
Advanced analysis of human movement patterns, joint kinematics, and motor control strategies to understand fundamental principles of human locomotion and motor function.
My research contributions include work on referred control systems and EMG-driven interfaces, exploring how humans can intuitively control robotic devices through muscle activation patterns.
Featured Research Poster

Development of bio-inspired robotic systems with multiple degrees of freedom for medical and research applications. These projects explore soft robotics principles, cable-driven actuation mechanisms, and EMG control systems.
Analog EMG Controlled Tentacle
4 Degrees of Freedom
Binary EMG Controlled Tentacle
4 Degrees of Freedom
Analog Joystick Controlled Tentacle
4 Degrees of Freedom
Cable Driven Tentacle
2 Degrees of Freedom
Cable Driven Finger Model
1 Degree of Freedom